





新闻资讯
作为实现高等级自动驾驶场景化应用的技术主线,车路协同(V2X)预警感知技术既是加强路侧基础设施对车端赋能的“管道”,也是推动“聪明的车”与“智慧的路”深度融合的关键支撑性技术。目前紧趋多源数据融合发展方向,聚焦纯视觉协同感知技术优化、激光雷达点云处理技术升级、多传感器时空信息匹配与数据融合技术以及车路协同感知技术标准体系构建等领域精准发力。
尽管从技术和产业发展的成熟度来看,网联深度支撑车路协同(V2X)仍然面临着技术融合、基础设施建设、以及商业运营模式等方面的困难和挑战,亟需围绕网联深度协同、路侧基础设施构建、数据互通壁垒破除、配套政策法规完善等方面全局把握、深耕细作,持续解决车路协同(V2X)技术全面推广应用面临的“感知不充分”和“规则不明确”两大核心问题,推动相关产业由示范应用快速迭代,最终向商业化运营成功转化。
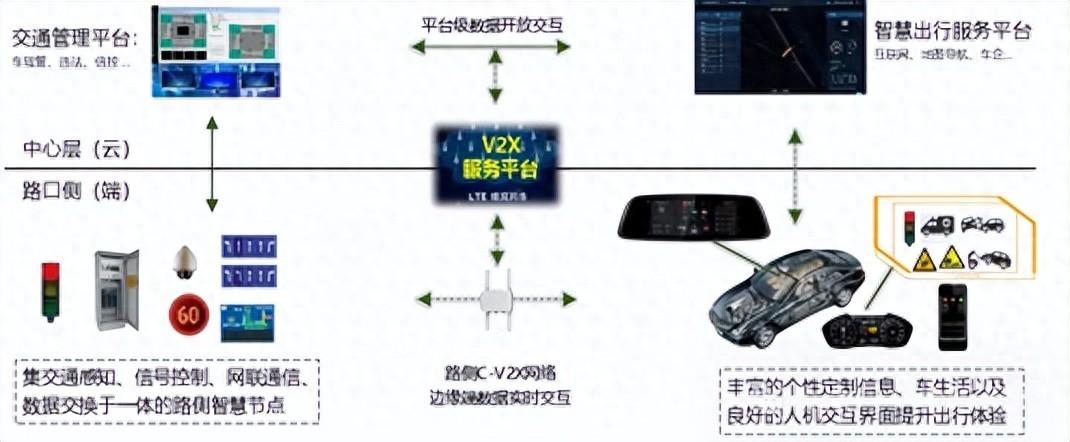
图1 公安交管视角车路协同技术架构
视觉传感器成本较低,基于交通领域的先验知识和经验,用具有身份判别度的特征进行描述,如图像中目标的边缘信息、色彩信息、车型和配饰等,以及更具有识别性的车身贴图、备胎、车内装饰、车身上的刮擦痕迹等外观信息。通过诸如空间信息(形状、大小、距离)、运动信息(速度、时间)和语义信息(颜色、类型、车牌)等较为丰富的环境语义信息描述,分析视觉传感器捕获的图像特征,借以执行如道路目标检测跟踪、语义分割、障碍监测、场景识别、车道检测、道路裂缝检测等多模式复杂任务。车路协同预警感知技术的实现有赖于视觉传感器兼具高清分辨率和泛在动态检测范围,确保在各种环境下均能捕捉到清晰完整的车辆运行环境信息。
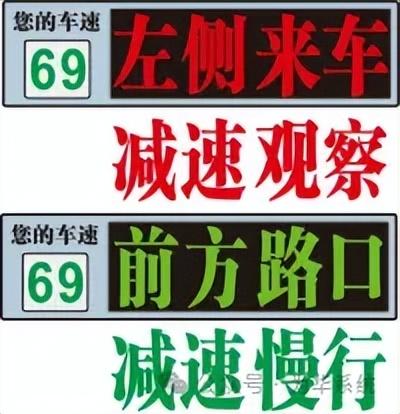
图2 车路协同预警信息语义表达
作为功能完善、适用性广、实用性高、可靠性强的智能化产品,为华智能哨兵预警系统能够有效感知车辆行驶及路面运行状态并着重解决超速超限、路口视距不良、恶劣天气影响、信息提示不及时不显著、事故及诱导信息发布途径不完善发布不及时等问题,通过交通诱导屏将过往车辆以及路面情况进行信息发布,以便警示驾驶员:减速慢行,谨慎驾驶,同时提醒行人:注意安全,遵守交通法规,从而实现智能交通设施之间以及智能交通设施与车辆及其他交通参与者之间的信息实时高效共享。同时,为路网交通状态分析及交通管控措施优化提供数据参考,保证道路安全、高效通行,提高系统运行效率。
基于激光脉冲往返时间的测量计算车辆与物体之间的距离,激光雷达在车路协同感知应用中发挥着重要作用。由于其激光束散度较低,可以减少距离对于功率的衰减,阳光直射条件下测量距离可达200 m;可采用旋转镜改变激光脉冲方向,实现360度全覆盖,最终生成激光雷达点云数据。
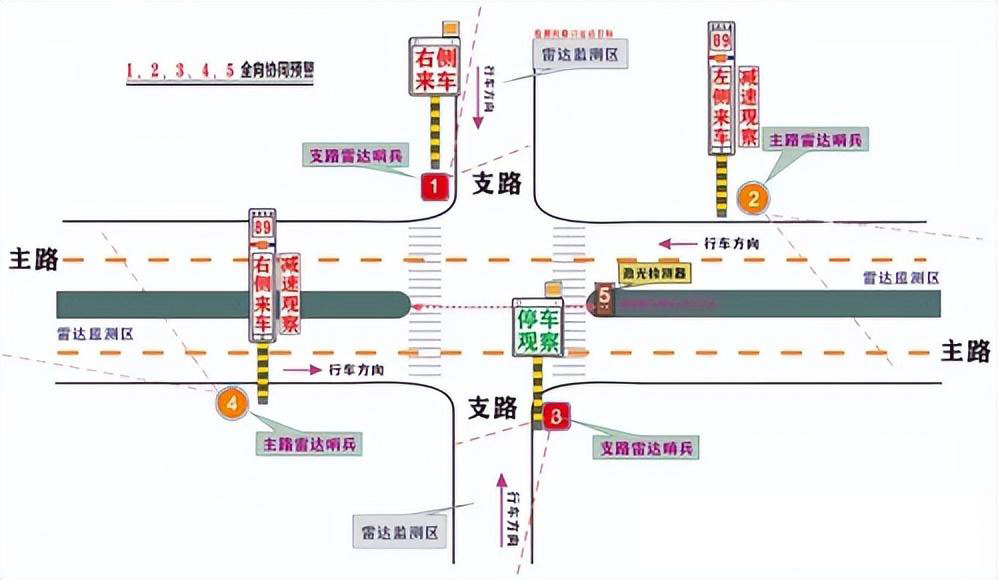
图3 为华预警系统激光雷达感知应用
激光雷达点云特征提取包括数据预处理、目标特征提取、目标分类三个过程。数据预处理涵盖点云降采样、坐标转换、点云滤波等流程。目标特征提取主要包括点云区域分割和特征提取两个步骤,区域分割阶段主要完成点云聚类,明确特征模式分类(如直线、圆弧等),并确定隶属该特征模式的区域及区域内的激光数据点集,以提取待分类目标;在特征提取阶段,主要选择多维特征对点云点数、距离、数据强度等进行提取,完成各特征参数的确定、特征点的提取以及特征值的计算。目标分类是将从点云数据中提取出的特征准确地归类为特定的目标类别的关键过程,这些类别可以包括车辆、行人、自行车、交通标志等交通对象。
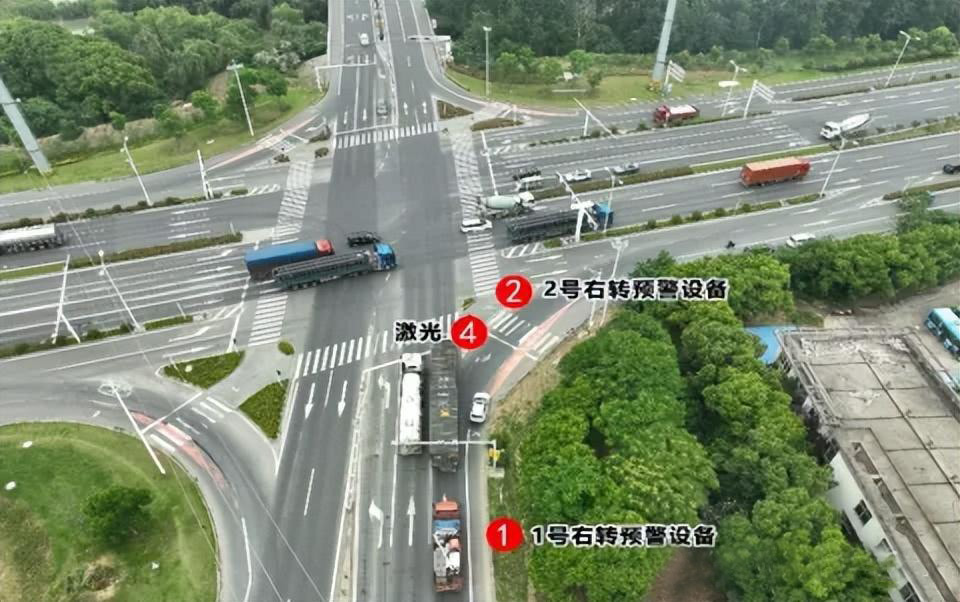
图4 激光检测实际场景应用
毫米波雷达具有天线波束窄、分辨率高、频带宽、抗干扰能力强等特点,精度可达到毫米级,检测过程中通过发射毫米级波束,实现对物体的快速定位。与激光雷达、摄像机等光学设备相比,毫米波雷达在恶劣天气下的性能表现更好、成本较低、易于大规模生产,目前已广泛应用于车载终端及路侧预警设备。
毫米波雷达感知技术与激光雷达感知技术都涉及点云数据的信号处理、目标检测等关键步骤,但各自的工作原理与特性存在一定区别,致使感知实施过程存在显著差异。毫米波雷达更多地利用电磁散射特性进行信号处理与目标检测,而激光雷达则主要依赖3D坐标信息与反射强度进行数据解读,实现运动畸变纠正。在数据密集度方面,毫米波雷达点云数据比激光雷达点云数据更为稀疏和分散,导致数据处理算法需要更加高效和简洁。
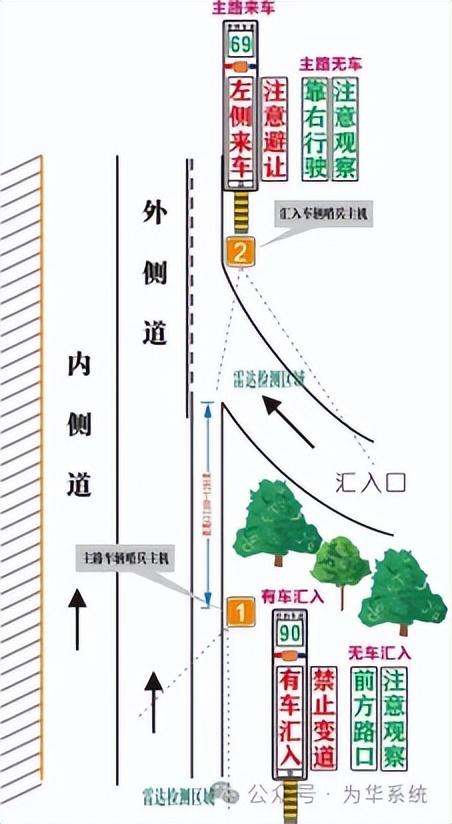
图5 高速合流匝道雷达预警检测技术应用
高速合流匝道雷达预警检测技术应用控制逻辑:当支路车辆行至高速汇入口,距离支路哨兵80~100米处,此时,当高速主路有车驶近汇入点【1号哨兵检测到车辆接近汇入点,自动无线发送数据给2号哨兵】,2号支路哨兵会向支路车辆发出红色警示信息:“左侧来车,注意避让”并启动红蓝爆闪灯,同时对匝道合流车辆进行测速警示。
当匝道合流行至高速汇入口,距离设备80~100米处,此时,当高速主路无车驶近汇入点,2号支路哨兵会向匝道合流发出绿色提示信息:“靠右行驶,注意观察”并启动红蓝爆闪灯,同时对行驶车辆进行速度提示。
多传感器融合感知通过有机组合不同来源传感器的信息片段,弥补了单一来源传感器感知方法的缺陷,提升了前端交通感知性能。随着道路智能化等级的提升,更多高精度的传感器将逐步布设于路侧基础设施,逐步降低对自动驾驶车辆本身硬件的要求,形成了车路多传感器融合发展态势。新兴的多传感器融合技术在车路协同自动驾驶和其他领域中正发挥着越来越重要的作用,如激光雷达与红外数据融合、红外与视频数据融合、激光雷达与视频数据融合等模式,数据融合将逐渐成为目标跟踪、交通障碍物检测、交通状态估计、异常检测与行为预测等前沿领域应用趋势。





发布日期: 2024-07-03

发布日期: 2023-11-13
发布日期: 2024-07-22
发布日期: 2024-04-29
发布日期: 2023-12-13
发布日期: 2024-01-03
发布日期: 2024-01-22

发布日期: 2025-04-21
发布日期: 2026-02-24
发布日期: 2026-02-24
发布日期: 2026-02-24
发布日期: 2026-02-24
发布日期: 2026-02-24














